Connecting to Delta servo drives

The Delta Electronics servo drives can be monitored / controld via Modbus and Webhmi. The communications settings are given in the #3 group of parameters:
| 03-00 | Network address |
| 03-01 | Speed |
| 03-02 | Protocol |
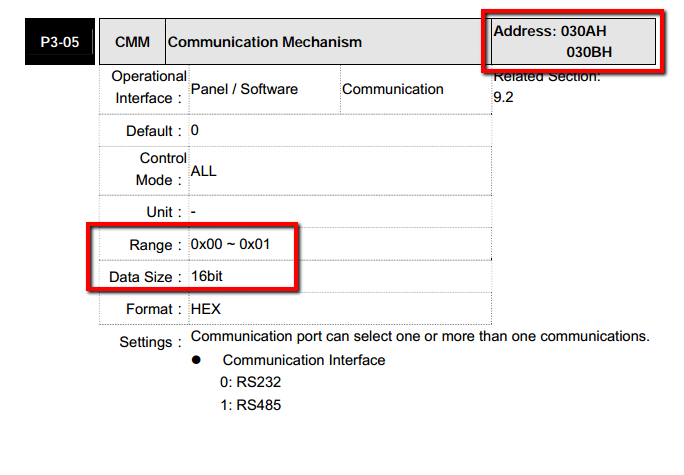
| 03-05 | Interface 0:RS232, 1:RS485 (485 only possible for multi-drop) |
| 03-06 | 03-06 (HR30C) defines the source for the digital inputs of the drive - wether they are “real” external inputs, or 'force' values got via Modbus. Bits 0..7 of this paramter corresponds to real digital inputs DI1..DI8. Writing 0 sets “real” mode, 1 - 'force' input from Modbus paramter 4-07 (HR40E) (it is a bit mask). |
Modbus adresses of all parameters are provided in the manual with its datatype and valid range: