Table of Contents
Useful programs
Bit functions
You can use Lua BitOp extension functions in your programs:
bit.tobit(x) -- normalize number to the numeric range of -- bit operations (all bit ops use this implicitly) bit.tohex(x[,n]) -- convert x to hex with n digits (default 8) bit.bnot(x) -- bitwise not of x bit.band(x1[,x2...]) -- bitwise and of x1, x2, ... bit.bor(x1[,x2...]) -- bitwise or of x1, x2, ... bit.bxor(x1[,x2...]) -- bitwise xor of x1, x2, ... bit.lshift(x, n) -- left-shift of x by n bits bit.rshift(x, n) -- logical right-shift of x by n bits bit.arshift(x, n) -- arithmetic right-shift of x by n bits bit.rol(x, n) -- left-rotate of x by n bits bit.ror(x, n) -- right-rotate of x by n bits bit.bswap(x) -- byte-swap of x (little-endian <-> big-endian)
To access idividual bits, you can use following handy functions:
function bw(n) return 2 ^ (n - 1) -- returns weight of the bit in pos. n end function hasbit(x, b) local p = bw(b) return x % (p + p) >= p -- returns if b is true/false; if hasbit(value, b) then ... end function setbit(x, b) return hasbit(x, b) and x or x + bw(b) -- sets bit b in х example: х = setbit(х, b)) end function clearbit(x, b) return hasbit(x, b) and x - bw(b) or x -- clears bit b in х end function togglebit(x, b) -- toggles bit b in x if hasbit(x, b) then return clearbit(x, b) else return setbit(x, b) end end function outbit(condition, x, b) -- output bool condition as 0 /1 into a bit if condition then return hasbit(x, b) and x or x + bw(b) else return hasbit(x, b) and x - bw(b) or x end end function outBit(condition, alias, b) -- output bool condition as 0 /1 into a bit of a internal register local new_value = outbit(condition, R(alias), b) W(alias, new_value) end function setBit(alias, b) -- sets bit in the register using alias or id local old_value = R(alias) local new_value = setbit(old_value, b) if (new_value ~= old_value) then WriteReg(alias, new_value) -- to prevent unnecessary writing end end function clearBit(alias, b) -- uses alias or id and crears bit in it local old_value = R(alias) local new_value = clearbit(old_value, b) if (new_value ~= old_value) then WriteReg(alias, new_value) end end function toggleBit(alias, b) -- toggles bit b in reg by alias or id local cur_value = R(alias) if hasbit(cur_value, b) then clearBit(alias, b) else setBit(alias, b) end return true end -- return bit from the position as a 1 / 0 function getBit(alias, b) if hasbit(R(alias), b) then return 1 else return 0 end end
To enhance readablity of complex program you may wrap actions made with the register of a bit type to their handy analogs. Then in a complex program you can quickly determine where bit varialbe is changed, checked etc.
-- this function to make shorter ifs operator for bit registes function TRUE(reg) return (R(reg)== 1) end function NOT(reg) return (R(reg) == 0) end function SET(reg) W(reg, 1) end function RESET(reg) W(reg, 0) end function OUT(condition, reg) -- shorter analog of setting / resetting bit register dependnig on condition if condition then W(reg, 1) else W(reg , 0) end end
Examples of using bit functions
Writing condition value into some bit
In the following example, a condition result is written right into the register mask. This could be used e.g. for status register, where each bit corresponds to some system alert while providing overall system status as 0 / >1 (no bit set(no alert), some bit set (there is an alert.)). This status register can be used in Level2 system to show the node's state.
-- sets bit in certain register depending on condition include "bit.lib" function main (userId) outBit(not R("someRegister"), "alertMask", 15) end
Table functions
-- converts bytes to integer value table.int = function(t) local HEX_NUMBERING = 16 return tonumber(table.hexStr(t), HEX_NUMBERING) end -- converts a table to hex view function table.hexStr(hextab, spacer) local hex = {} for _, hexbyte in ipairs(hextab) do table.insert(hex, getHexByteAsStr(hexbyte)) end return table.concat(hex, spacer) end -- converts tab to bcd number table.bcd = function(t) local hex = table.hexStr(t) local out = tonumber(hex) return out end -- gets 2-char hex string from a byte function getHexByteAsStr(inputByte) local strByte = string.format("%X", inputByte) return (#strByte == 1 and '0' .. strByte) or strByte end -- reverses a table table.reverse = function (tab) local outTable = {} for i = #tab, 1, -1 do table.insert(outTable, tab[i]) end return outTable end --[[ find an element in a table @ t - input table , v - value to find --> value index of false (if not found) --]] function table.find(t, v) for i, tv in pairs(t) do if (tv == v) then return i end end return false end --[[ finds pattern in a table @ t - input table , pttrn - pattern to find --> index of the first byte following the pattern --]] function table.findPattern(t, pttrn) for tabIndex, _ in ipairs(t) do local matchFlag = true for seqIndex, sequenceByte in ipairs(pttrn) do -- checking pttrn inside a t matchFlag = matchFlag and (sequenceByte == t[tabIndex + seqIndex - 1]) if (not matchFlag) then matchFlag = false break end end if matchFlag then return (tabIndex + #pttrn) end end return false end --[[ checks if the table has an elem @ t - table , test --> index of false (if not found) --]] function table.some(t, test) for i, tv in pairs(t) do if (test(tv)) then return true end end return false end function table.sub(t, s, e) local newTab = {} if (s and e) then for i = s, e do table.insert(newTab, t[i]) end end return newTab end --[[ convenient print function for tables @ t - table, indent - indent between key & value --]] function tprint(t, indent) if not indent then indent = 0 end for k, v in pairs(t) do local formatting = string.rep(' ', indent) .. k .. ': ' if type(v) == "table" then ERROR(formatting) tprint(v, indent + 1) -- recursive call else if type(v) == "boolean" then v = v and "TRUE" or "FALSE" end ERROR(formatting .. v) end end end
Compare and trigger
This is used to detect when the value reach certaint value and make one-time action.
cmp = {} function cmp : new(reg, level) self.__index = self return setmetatable({ reg = reg, level = level, flag = false }, self) end function cmp : __call(helper) local regValue = R(self.reg) if helper(regValue, self.level) then if (not self.flag) then self.flag = true DEBUG("got it !") return true end else self.flag = false end return false end function greaterThan(arg1, arg2) return arg1 >= arg2 end function main (userId) if (not detect) then detect = cmp : new ("dBit2", 1) end if detect(greaterThan) then -- SendTelegramMessage() end end
Iteraion over indexed registers
You can iterate your register in loogs using their alias names, which contain the index, e.g.:
--[[ The program uses random number from 1 to 10 as a base to set 3 consequtive registers named "indexedRegister1", "indexedRegister2", "indexedRegister3" --]] function main (userId) local startValue = math.random(1, 10) for i = 1, 3 do W("indexedRegister" .. i, startValue) startValue = startValue + i end end
The result is shown on the following picture:

Debug printing
Standard functions (INFO and other ) for writing to communication log and lua console has some drawbacks:
- they expect only one parameter of a string type, so you have to concatenate multiple parameters with '..' operator and add spaces between values
- they don't check input parameters for a nil, so the script won't run after the error line if the 'nil' is met in the parameters being concatenated.
To enhance console and communication log output you may use your own versions based on these standard functions:
--[[ universal print function prints when global ENABLE_DEBUG is set @ ... any list if arguments have | symbol treats data as a 2-row data "arg1, arg2, arg3 ... ", '|' , arg1, arg2, arg3 ... if arg type == table print all using tprint otherwise prints all arguments in a row --]] function DBG(...) if (not ENABLE_DEBUG) then return end -- piped printing local pipePosition = table.find(arg, '|') if (pipePosition) then -- make header row local th = {} for word in string.gmatch(arg[1], "%S+") do table.insert(th, word) end -- make data row local td = table.sub(arg, pipePosition + 1, #arg) if (#th ~= #td) then ERROR('th & td in DBG are not equal!') ; return else for i = 1, #th do local thl, tdl = string.len(th[i]), string.len(td[i]) local diff = math.abs(thl - tdl) if (thl > tdl) then td[i] = wrapToSpaces(td[i], diff) end if (tdl > thl) then th[i] = wrapToSpaces(th[i], diff) end end DEBUG(table.concat(th, ' ')) ; DEBUG(table.concat(td, ' ')) end return end -- table print if table.some(arg, function (a) return type(a) == 'table' end ) then tprint(arg) ; return end -- print in a row DEBUG(table.concat(arg, ' ')) end --[[ add extra spaces on both sides of string @ s - string n - number of spaces --> string wrapped in spaces --]] function wrapToSpaces(s, n) local spaces = string.rep(' ', math.floor(n / 2)) return spaces .. s .. ((n % 2 == 0) and spaces or spaces .. ' ') end
Then the print output can be enhanced like this:
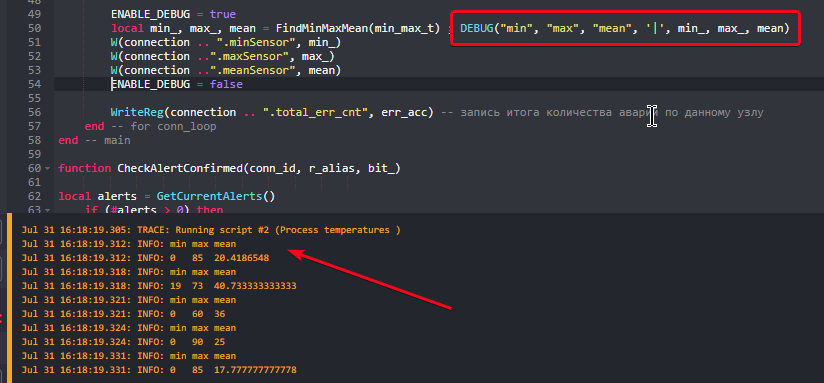
The ENABLE_DEBUG flag should be global boolean variable in the calling script. You may just to set it when needed and save the script.
ENABLE_DEBUG = true -- false will disable debug print
Sometimes you need to trace how a number of different scripts are running together, but want to filter out unneccesary lines in the communication log. Then you can use internal register of a string type for storing IDs of scripts where you want to enable log output. Inside each script you can check if its ID exists in the “enabled” list or no and control ENABLE_DEBUG variable. E.g.
thisScriptID = 43 -- ID is shown in the script list local i,_,_ = string.find ( -- use this function to find script ID in the list R ("enDebugList"), -- read enable string from the int. register "%s+(".. thisScriptID ..")%s+") -- find a pattern of digit(s) inside spaces if not i then -- equals to if ( i == nil ) ENABLE_DEBUG = false else ENABLE_DEBUG = true end
For complex tables print, you can use the following function:
function tprint(t, indent) if not indent then indent = 0 end for k, v in pairs(t) do local formatting = string.rep(' ', indent) .. k .. ': ' if type(v) == "table" then ERROR(formatting) tprint(v, indent + 1) -- recursive call else if type(v) == "boolean" then v = v and "TRUE" or "FALSE" end ERROR(formatting .. v) end end -- for end -- tprint
Date & Time operations
When you need to select different date - time numbers, you can use the following example:
function main (userId) local dateTimeTable = os.date("*t", os.time()) INFO(dateTimeTable.hour) INFO(dateTimeTable.min) end
-- converting utc timestamp in human readable string function getDateString(utc) return os.date("%c", utc) end
Please refer to the Lua documentation site.
Running hours meter
Running hours meter accumulates the time while some equipment has been turned on.
function main (userId) runHoursMeter ( R ( "runHours_condition" ) == 1 , "runHours") end function runHoursMeter ( condition , meter_alias) --[[ strores the time of prevous call in a _prevTime when called, if condition is met adds diff. between current time and prevTime to _Acc recieves prefix (meter_alias) and generates needed register aliases by adding suffix --]] local now = os.time () if condition then local curAcc = R ( meter_alias .. "_Acc" ) W (meter_alias .. "_Acc" , curAcc + ( now - R ( meter_alias .. "_prevTime" ) ) ) end W ( meter_alias .. "_prevTime", now ) -- store previous call time end
Three registers were used to demonstrate its work:
- runHours_prevTime - this register stores the time of the previous function call. Type - Unix Type
- runHours_Acc - accumulator for the running hours. Type - Double Word UInt, with the “Display as time duration” checkbox set
- runHours_condition - to test how the function works from the interface this register is used. Type - Bit.

Timers
You can create your timers preventing jittering unnecessary input, which leads to mulitple alert generation or other action, prolongate some states after they changed.
Below some examples are provided:
- Simple - Ton/Toff timers. These ones keep their state in the script's global vars, so each time the project restarts, they will be initialized. For most cases that's enough.
- Reset-Restart proof timers. These timer keep their state in the external registers, so they are tolerant to even project restart. Use these timers for critical control.
Simple TON timer
-- Timer constructor Timer = {} ; setmetatable(Timer, {__call = function(self) local obj = {stamp = os.time(), out = false} return setmetatable(obj, {__index = self}) end }) -- Timer loop function Timer : run(in_, delay) local now = os.time() if (not in_) then self.out = false ; self.stamp = now else if (not self.out and (now - self.stamp) >= delay) then self.out = true end end return self.out end function Timer : reset() self.out = false ; self.stamp = os.time() end
Simple TOFF timer
toff_proto = {} toff_proto.__index = toff_proto function toff_proto.new(delay) return setmetatable({d = delay, stamp = os.time(), out = false, }, toff_proto) end function toff_proto:__call(in_) local now = os.time() if (in_ ~= self.out) then if in_ then self.out = true -- immediate ton! else local diff = now - self.stamp if diff < self.d then DEBUG("going to sw off in " .. self.d - diff) return self.out -- don't update stamp else DEBUG("Switched off!") ; self.out = false end end end self.stamp = now return self.out end
Universal Timer (TON / TOFF)
The timer compares its current state with the input condition:
- current state = 0, input = 1 - the timer will switch on its output after onDelay time. If the offDelay parameter = 0, then it will be “pure” TON timer
- current state = 1, input = 0 - the timer will switch off its output after offDelay time. If the onDelay parameter = 0, then it will be “pure” TOFF timer
Two external registers are needed for this function to work:
- a register with “timer_name” script alias of a Unix Time type - to store the time stamp of the rising / falling edge on the input
- a register with “timer_name_out” script alias of of a Bit type - to keep timer state between calls (in case of project restart etc. )
Use sensible names for the register script aliases - to associate clearly aliases with the “real” equipment. This will greatly improve code readability. E.g. if you want to use timer to mask some alert condition from pressure sensor #1, you might use “lowP1_AlertTmr”and “lowP1_AlertTmr_out” aliases.
function Timer (bool_input, onDelay, offDelay, tmrAlias) -- bool sec to ON sec to OFF string alias local now , nowString, curTimeStamp, curTmrState = os.time(), os.date("%c", now), R(tmrAlias), TRUE(tmrAlias .."_out") DBG("Timer State Stamp", "|", tmrAlias, curTmrState, os.date("%c", curTimeStamp)) -- protects from malfunctions on very first run if curTimeStamp == 0 then DBG("curTimeStamp was zero in this timer!") WriteReg(tmrAlias, now) return nil, 0 -- countdown end -- in and output are equal if (bool_input == curTmrState) then WriteReg(tmrAlias, now) ; DBG("timer inputs match") return curTmrState, 0 -- as bool -- TON elseif bool_input then if ((now - curTimeStamp) > onDelay) then SET(tmrAlias .."_out") ; WriteReg(tmrAlias, now) ; DBG("detected ON state after delay") return true, 0 else local countDown = onDelay - (now - curTimeStamp) ; DBG("countdown to On in ", countDown) return curTmrState, countDown end -- TOFF elseif not bool_input then if ((now - curTimeStamp) > offDelay) then RESET(tmrAlias .."_out") ; WriteReg (tmrAlias, now) ; DBG("detected OFF state after delay") return false, 0 else local countDown = offDelay - (now - curTimeStamp) ; DBG("countdown to OFF in ", countDown) return curTmrState, countDown end end end -- Timer func
Note: This function should be called in every scan, i.e. don't put it inside "ifs", otherwise it won't update the timestamp and may not work properly.
Generating alert messages with time - delay
Generating alerts is a common thing in remote monitoring application. Becuase the system being monitoring can “balance” on the “alert / normal” point there should be made some time delay to filter alerts, especially when they are sent via messaging systems (e-mails, viber, telegram, sms)
PRESSURE_HIGH_LEVEL = 6.0 -- bar PRESSURE_AL_DELAY = 60 -- seconds function main(userID) local error_condition = R("pressure") >= PRESSURE_HIGH_LEVEL local alTmrState = R("pAlerTmr_out") -- remember current timer state before calling a Timer function if Timer(error_condition, PRESSURE_AL_DELAY, 0, "pAlerTmr") then if alTmrState == 0 then -- alert rise SendSMS("380679999999", "Pressure is over High Limit!") end else if alTmrState == 1 then -- alert fall SendSMSMessage("380679999999", "Pressure is normal now.") end end end
This one uses simper timer:
include "timers" CHAT_ID = 569335646 MSG_DELAY = 5 * 60 function main (userId) reportConnError(2, MSG_DELAY, CHAT_ID, 'CONN STUCK ON NODE https://node-name.webhmicloud.com') end function reportConnError(connId, delay, chatId, msg) if (not tmr) then tmr = Timer() end if tmr : run(GetConnectionErrors(connId) > 0, delay) then SendTelegramMessage(chatId, msg) tmr : reset() end end
Filtering frequent messaging
When you want to filter too frequent messaging from WebHMI, e.g. about alerts to the Telegram or else, you can use the following script :
TELEGRAM_BOT_ID = "974482918" -- your telegram chat bot id -- TELEGRAM_BOT_DDS = "569335646" curAlertsNum = 0 -- global counter for current active alerts blockingTimer = { turnedOn = false, timeStamp = 0, -- ADJUST FILTER TIME HERE AS NUMBER_OF_MINUTES * NUMBER_OF_SECONDS timerDelay = 5 * 60, } function blockingTimer : method(argument) local now = os.time() if (self.timeStamp == 0) then self.timeStamp = now -- init for 1st call end if (argument == 'set') then self.turnedOn = true self.timeStamp = now end if self.turnedOn and (now - self.timeStamp > self.timerDelay) then self.turnedOn = false else local countDown = self.timerDelay - (now - self.timeStamp) DEBUG("masking new alerts with blockingTimer: " .. countDown) end return self.turnedOn end function main (userId) local alerts = GetCurrentAlerts() if (not blockingTimer : method()) and (#alerts > curAlertsNum) then -- number has increased, # - means count table elements local alertNames = {} ; DEBUG("Alert count has increased!") for alertIndex, astruc in ipairs(alerts) do table.insert(alertNames, astruc.title) end alertNames = table.concat(alertNames, ', ') SendTelegramMessage(TELEGRAM_BOT_ID, "Current alerts are: " .. alertNames) blockingTimer : method('set') end curAlertsNum = #alerts end
Moving average
The moving average is useful for smoothing the values of parameters that have noises, pulsations so to avoid unneccessary control outputs reacting to unwanted noise.
Algorithm of the moving average: at the beginning of the filter on the sample, N values are counted by the arithmetic mean, after reaching the end of the sample, one element is discarded (by dividing the sum by the length of the queue), a new one is added instead of it, and the amount is again divided by the length of the queue.
function MovingAverage(reg, filter) local Q_DEPTH , queue_fill, av_sum = 10 , R(filter .. "_fill"), R(filter .. "_sum") local in_value, tmp_var, out_value = R(reg), 0, 0 -- read input and initialize some vars if (queue_fill < Q_DEPTH) then -- queue not filled yet av_sum = av_sum + in_value -- accumulator queue_fill = queue_fill + 1 -- inc. index else -- now the queue full tmp_var = av_sum / Q_DEPTH -- calc. weight of the one element of the queue av_sum = av_sum - tmp_var + in_value -- subtract it and add new input value end if (queue_fill == Q_DEPTH ) then -- if filled out_value = av_sum / Q_DEPTH -- calc. as current accumulator / queue lentgh, moving average else out_value = av_sum / queue_fill -- not filled then mean average end -- remember state W (filter .. "_sum", av_sum) W (filter .. "_fill" , queue_fill) return out_value end -- MovingAverage
Two registers are required for this script -
- accumulator for the sum, e.g. “meanOutsideT_sum”
- current queue index “meanOutsideT_fill”
ON-OFF control
Function based
include "LIB" SP, ZONE = 30, 0.5 -- °C PV_REG, OUT_REG = 21, 50 -- id of the registers with process value and output function tempControl(sp, pv, zone, out, inZone) -- on - off function --- local inZone_ = (pv >= (sp - zone)) and (pv <= sp) and TRUE(inZone) if (pv >= sp) then SET(inZone) elseif (pv < (sp - zone) ) then RESET(inZone) end DEBUG("sp pv " .. sp .. ' ' .. pv) U(out, not (pv >= sp or inZone_) ) end function main (userId) ------- Main body --------------------- tempControl(SP, R(PV_REG), ZONE, OUT_REG, "inZoneControl") end
Object programming style
include "LIB" tempControl = {} -- on-off control obj --------------------------------------- function tempControl : new (pvReg, outputReg, inZoneReg) -- constructor & init self.__index = self return setmetatable( { pvReg = pvReg, out = outputReg, inZoneReg = inZoneReg }, self) end function tempControl : __call (sp, zone) -- controller local pv = R(self.pvReg) ; DEBUG("sp pv " .. sp .. ' ' .. pv) local inZone = (pv >= (sp - zone)) and (pv <= sp) and TRUE(self.inZoneReg) if (pv >= sp) then SET(self.inZoneReg) elseif (pv < (sp - zone) ) then RESET(self.inZoneReg) end U(self.out, not (pv >= sp or inZone)) end -------------------------- Main --------------------------------------------------------- SP, ZONE = 30, 0.5 -- °C PV_REG, OUT_REG = 21, 50 -- id of the registers function main (userId) -- creates obj if (not control) then control = tempControl : new (PV_REG, OUT_REG, "inZoneControl") end control(SP, ZONE) end
Both examples use the following library
function TRUE(reg) -- checks if value is 1 return (R(reg) == 1) end function NOT(reg) -- checks if value is 0 return (R(reg) == 0) end function SET(reg) -- sets reg to 1 local curValue = R(reg) if curValue and (curValue ~= 1) then W(reg, 1) end end function RESET(reg) -- sets reg to 0 local curValue = R(reg) if curValue and (curValue ~= 0) then W(reg, 0) end end function U(reg, new_value) -- Updates values only when it differs from the target register content local cur_value = R(reg) if (cur_value ~= nil and new_value ~= nil) then if (type(new_value) == 'boolean') then -- protect from boolean value new_value = new_value and 1 or 0 end if (new_value ~= cur_value) then W(reg, new_value) end else ERROR("Could not update value in reg" .. reg .. ' with a value of ' .. tostring(new_value)) end end
Another way of creating objects:
TimerConstructor = function () return setmetatable({}, { __call = function(self, delay) local now = os.time() if (not self.stamp or now - self.stamp >= delay) then self.stamp = now return true else return false end end }) end -- usage function main (userId) -- creating timer if (not timer) then timer = TimerConstructor() end if timer (60) then INFO('timer!') for i = 1, 8 do toggle('synapse.do' .. i) end end end function toggle(v) W(v, 1 - R(v)) end
PID - control
An example of implementing a PID controller in WebHMI:
function PID ( sp , pv , c_alias) DBG ( "Entered PID for ", c_alias ) local now, nexTime = os.time() , R ( c_alias .. ".nextPidTime" ) local CYCLE_TIME = R ( c_alias..".pidCycleTime" ) local ZONE = 0.2 -- can alse be an external setting -- параметры регулятора local Kp = R ( c_alias..".Kp" ) local Ti = R (c_alias..".Ki" ) local Td = R (c_alias..".Kd" ) local Int_sum = R ( c_alias..".pidIntegral" ) -- integral part accumulator local G = R (c_alias .. ".pidOut") local Err = sp - pv ; DBG ( "current Error = ", Err ) -- add some tolerance for error if ( math.abs ( Err ) <= ZONE ) then Err = 0 end DBG(" seconds left for PID cycle = "..tostring(nexTime - now)) if ( now >= nexTime ) then W ( c_alias..".nextPidTime", now + CYCLE_TIME) -- calc. next cycle time local dErr = Err - R (c_alias..".pidPrevError" ) -- calc. integral limit local iSUM_LIMIT = G_LIMIT * (Ti / Kp) --integral part check if (Ti == 0) then Int_sum = 0 else Int_sum = Int_sum + Err -- check limits of integral part if Int_sum >= iSUM_LIMIT then Int_sum = iSUM_LIMIT elseif Int_sum < 0 then Int_sum = 0 else -- undefined if end end G = Round(Kp * (Err + (Int_sum / Ti) + Td * dErr)) -- check output and limit if (G < 0) then G = 0 end if (G > G_LIMIT) then G = G_LIMIT end -- refresh outputs W (c_alias..".pidPrevError", Err) W (c_alias..".dErr", dErr) W (c_alias.. ".pidIntegral", Int_sum) W (c_alias..".pidOut", G) end -- time stamp return G end -- PID
This algorithm is typical for use in PLCs. Because the regulator is run at regular intervals, i.e. diff. and int. the components are always computed on the same time scale, so it is not necessary to divide and multiply them by time to obtain the derivative and integral, we can select the time constants Ti, Td. In this algorithm, Ti is an inverse quantity (the larger its value, the smaller the contribution of the integral error).
In this example the register are addressed with “connection.alias”, i.e. the script will look for register with name “alias” in the connection “connection”.
Fixed quantity circulation with PID
This algorithm allows to precisely control process variable (temperature, pressure etc. ) with PID control which transfers its output for smooth control to only one power unit (current active unit - A/C, heater, fan section etc.), while other units work at maximal or minimal output.
function CircControl ( sp, pv, alias ) local TOTAL_CH = 3 -- total channels local G_MIN, G_MAX = 0 , 100 -- limits of pid output local tmrSwDelay = R ( alias .. "pidCycleTime" ) * 3 local G = PID ( sp, pv, alias) DBG ( "CircControl pidOut = ", G ) local curCh = R ( alias .. "curCh") DBG ( "curCh", curCh ) -- filtering small error local err = sp - pv if ( math.abs ( err ) <= 0.2 ) then err = 0 end local fwTimer = alias .. "fw_Tmr" DBG ( "fw pre-cond. - ", NOT ( fwTimer .. "_out") , (err < 0), ( G == G_MIN ) ) if Timer ( ( err < 0 ) and ( G == G_MIN ) , tmrSwDelay , 0 , fwTimer ) then -- if stay too long with negarive error, decrease cnannel if ( curCh + 1 ) <= TOTAL_CH then DBG ( "fw condition detected!, curCh now = ", curCh ) curCh = curCh + 1 W ( alias .."curCh", curCh ) -- and set max. output for the lower channel G = 100 -- for smooth switching W (alias .. "pidOut", G ) W (alias .. "pidIntegral", 1000) end end local backTimer = alias .. "back_Tmr" DBG ( "back pre-cond. - ", NOT ( backTimer .. "_out") , (err > 0), ( G == G_MAX ) ) -- if stay too long with positive error, increase cnannel if Timer ( ( err > 0 ) and ( G == G_MAX ) , tmrSwDelay , 0 , backTimer ) then if (curCh - 1) >= 1 then DBG ( "back condition detected!, curCh now = ", curCh ) curCh = curCh - 1 W ( alias .."curCh", curCh ) -- and set low output value for the next channel -- for smooth switching G = 0 W (alias .. "pidIntegral", G ) W (alias .. "pidOut", G ) end end -- pid output transferred to current channel, lower channels work at minimal, higher -- channels at maximal output local ch_values = { 0 , 0 , 0 } for i = 1 , 3 do if ( i < curCh ) then ch_values [i] = G_MIN elseif ( i == curCh ) then ch_values [i] = G elseif ( i > curCh ) then ch_values [i] = G_MAX else DBG ("Undefined if in ch_values assignment, Line:94 ") end end -- for ; DBG ( "now channels are:", ShowTable ("%f" , ch_values) ) return ch_values[1], ch_values[2], ch_values[3] end
Time Circulation algorithm (together with redundancy function)
This algorithm is used in systems where it is necessary to alternate the operation of mechanisms (pumps, fans, air conditioners) over time, or on the run hour meters. For example, a set of 2 units is used, which must be alternated in time. If an error occurs on some unit, then the algorithm starts working only on the working (redundancy function). An example of setting the required registers is given below:
include "common.lib" ; include "bit.lib" ; ENABLE_DEBUG = true AL = {LOW_P_BIT = 3, DRY_RUN_BIT = 2} function main (userId) local PAUSE_BEFORE_SW_ON = 10 -- sec. local C_TMR_ON_DELAY = R("pumpCircTime") * 3600 -- 30 sec. local alerts = R("alertsRegister") local pressure_Ok = not hasbit(alerts, AL.LOW_P_BIT) and not hasbit(alerts, AL.DRY_RUN_BIT) local winter = TRUE('winter_season_flag') local p1_Ok = NOT("oL_relay") and TRUE("p1Auto") and winter and pressure_Ok local p2_Ok = NOT("p2OL_relay") and TRUE("p2Auto") and winter and pressure_Ok local leadPump = R('abLeadPump') -- active pump if not p1_on_tmr then -- sw on timers p1_on_tmr = ton_proto.new() ; p2_on_tmr = ton_proto.new() end local p1_cmd = p1_on_tmr(p1_Ok and (leadPump == 1), PAUSE_BEFORE_SW_ON) OUT(p1_cmd, "pumpOnOff") local p2_cmd = p2_on_tmr(p2_Ok and (leadPump == 2), PAUSE_BEFORE_SW_ON) OUT(p2_cmd, "p2OnOff") DBG("winter alerts pressure_Ok p1_Ok p2_Ok p1_cmd p2_cmd", '|', winter, alerts, pressure_Ok, p1_Ok, p2_Ok, p1_cmd, p2_cmd) local circTmr = Timer(p1_Ok and p2_Ok, C_TMR_ON_DELAY, 0, "pumpCirculationTmr") if circTmr then leadPump = (leadPump == 1) and 2 or 1 RESET("pumpCirculationTmr_out") end if (p1_Ok and not p2_Ok) then leadPump = 1 end if (p2_Ok and not p1_Ok) then leadPump = 2 end if not (p1_Ok or p2_Ok) then leadPump = 0 end if (p1_Ok and p2_Ok and (leadPump == 0)) then leadPump = 1 end UpdReg("abLeadPump", leadPump) end
Also here you need a script that will expose the flags of errors of work on certain conditions, read the status of the protection devices, the error registers on the interface, and so on.
3-point control for a valve or servo
A 3-point method is used to control the position of the valve, servo, gate valve, etc., when 3 wires are used to control the drive - 'common', 'power UP', 'power - DOWN'. Such drives may or may not be equipped with end position sensors. Sometimes, in the absence of position sensors and low requirements for positioning accuracy, an algorithm can be used when the drive leaves down or up (either one position sensor or one command for a time longer than the valve's full travel time), initializes the coordinate, and then go to the specified position.
To determine intermediate positions, a calculated value is used, determined from the characteristics of the 'full path time', which can also be determined experimentally.
Below is a variant of 3-point control for a valve withoutlimit switches.
function valveControl(v) local FULL_PATH_TIME = R(v .. "pathTime") ; local KOEF = 100 / FULL_PATH_TIME local HOMING_DELAY = R(v .. "homingDelay") * 60 * 60 -- get seconds from hours local auto, autoOpenCmd, autoCloseCmd, now = TRUE("auto_mode"), TRUE(v .. "openCmd"), TRUE(v .. "closeCmd"), os.time() local motionTmr = function() -- calc. path quant passed from last call local quant = 0 if (autoOpenCmd or autoCloseCmd) then quant = (now - R(v .. "motionTmr")) * KOEF ; SET(v .. "valveStatus") -- opening if autoCloseCmd then quant = quant * (-1) -- closing UpdReg(v .. "valveStatus", 2) end else RESET(v .. "valveStatus") quant = 0 end -- if motion UpdReg(v .. "motionTmr", now) -- remember last call return quant end -- motionTmr local pos = Limiter(Round(R(v .. "curPosition")) + motionTmr(), 0, 100) local sp = R(v .. "posSetpoint") local uShoot, oShoot = (pos < sp), (pos > sp) local homingOut = TRUE(v .. "homingTmr_out") local homing = Timer(not homingOut, HOMING_DELAY, FULL_PATH_TIME * 2, v .. "homingTmr") if not homingOut and homing then AddInfoMessage("Started homing for valve " .. v) end OUT(auto and uShoot and not homing or (not auto and TRUE(v .. "manOpenCmd")), v .. "openCmd") OUT(auto and oShoot or homing or (not auto and TRUE(v .. "manCloseCmd")), v .. "closeCmd") UpdReg(v .. "curPosition", pos) DBG("auto sp pos autoOpenCmd autoCloseCmd uShoot oShoot ", '|', auto, sp, Round(pos, 1), autoOpenCmd, autoCloseCmd, uShoot, oShoot) end
Other handy functions
-- round a value with set precision function Round (num, numDecimalPlaces) local mult = 10^(numDecimalPlaces or 0) return math.floor(num * mult + 0.5) / mult end -- checks if value within range function InRange (min, max, value) if (value >= min) and (value <= max) then return true else return false end end -- scaling based on y = kx + b formula function linearCalc ( value, x1, x2 , y1, y2 ) local k = (y1 - y2 ) / (x1 - x2 ) local b = y1 - k * x1 local y = k * value + b return y end function GetTimeFromHHMM(arg1, arg2 , type, incYearFlag) -- get UNIX time from the month day hour minute -- type HHMM - using hour minutes -- type mmdd - using day month local dateTable = os.date("*t", now) local result = 0 --[[ produces the table {year = 1998, month = 9, day = 16, yday = 259, wday = 4, hour = 23, min = 48, sec = 10, isdst = false} --]] if (type == "HHMM") then dateTable.hour = arg1 dateTable.min = arg2 dateTable.sec = 0 return os.time(dateTable) elseif (type == "mmdd") then dateTable.day = arg1 dateTable.month = arg2 dateTable.sec = 0 if incYearFlag then dateTable.year = dateTable.year + 1 end result = os.time(dateTable) DEBUG("GetTimeFromHHMM going to return this - "..os.date("%c",result)) return result else ERROR("Undefined if in GetTimeFromHHMM") end end -- GetTimeFromHHMM function U(reg, new_value) -- U = UpdateReg local cur_value = R(reg) if (cur_value ~= nil and new_value ~= nil) then if (type(new_value) == 'boolean') then new_value = new_value and 1 or 0 -- to update bit registers from boolean conditions exressions end if (new_value ~= cur_value) then W(reg, new_value) end else ERROR("Could not update value in reg" .. reg .. ' with a value of ' .. tostring(new_value)) end end function P_TRIG(var, previous) -- возваращет pos / neg если было обнаружено изменение -- false - если не было зименения -- пред. состояние запоминается в previous DEBUG("P_TRIG was called with this " .. var .. " " ..previous) local curVar = R(var) if not curVar then return false end local prevVar = R(previous) ; DEBUG(" p_trig " .. curVar .. " " .. prevVar) W (previous, curVar) if (curVar ~= prevVar) then if curVar > prevVar then return "positive" else return "negative" end end return false -- nothing happened end -- P_TRIG -- multiple ids or aliases read, returns table, have to be unpack() 'ed -- usage: v1, v2, v3... = unpack(mRead(1, 2, 3, ...)) function mRead(...) local results = {} for i = 1, #arg do local param = arg[i] -- INFO("processing " .. param .. " paramter") results[i] = GetReg(param) end if (#results == 1) then return results[1] else return results end end
PLC - like control
If you are an experienced user of PLC and get used to Ladder Diagram or FBD languge, in the beginning you may feel difficult to adapt to writing the same algorithms in WebHMI script editor.
But using above mentioned handy funtions and writing your own analogs of your PLC function you can get almost the same short and clear code almost identical to ladder diagram.
E.g. let's consider this ladder network from Siemens Tia Portal, which enables running Pump 1 and Pump 2 depending on day time and other conditions:
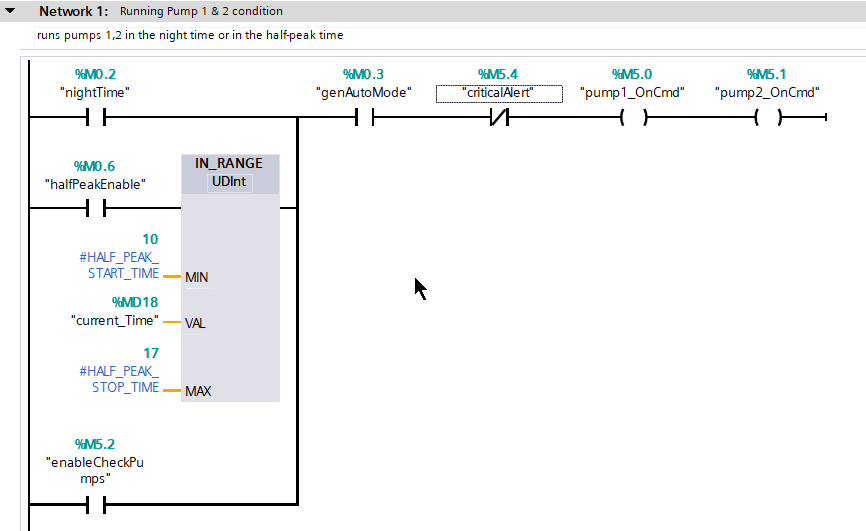
The same logic could be written like this -
function main (userId) -- Pump 1 & 2 logic local if_pump1_2_run = (TRUE("nightTime") or TRUE("halfPeadEnable") and InRange(R("hPeakStart"), R("hPeakEnd"), os.time ()) or TRUE("enableCheckPumps")) and TRUE("genAutoMode") and NOT("criticalAlert") OUT(if_pump1_2_run, "pump1_OnCmd") OUT(if_pump1_2_run, "pump2_OnCmd") end
Self-masking filter for the physical button (one-shot)
Sometimes it is important to control a series of actions with a guaranteed delay between them, i.e.avoid “sticking” action together when the actions are initiated with a button.
The button or other signal may have duration in time, but this signal is used for one-shot pulse to trigger next action. In the ladder program, this could be done like this:
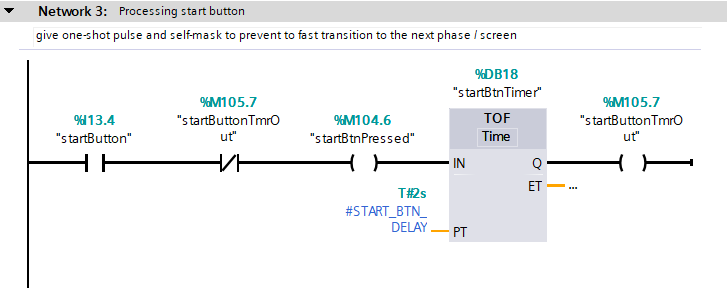
Using handy lua functions from above, it could be written in this way:
function main (userId) -- after pressing physical button -- generate one-scan event and then block itself for set delay local SELF_MASK_DELAY = 8 -- seconds local enCond = TRUE("button") and NOT ("lockTmr_out") ; OUT(enCond , "evTrigger") if enCond then AddInfoMessage("triggered button and masked itself for " .. SELF_MASK_DELAY .. ' ' .. "seconds") end Timer(TRUE("button" ), 0 , SELF_MASK_DELAY , "lockTmr") end
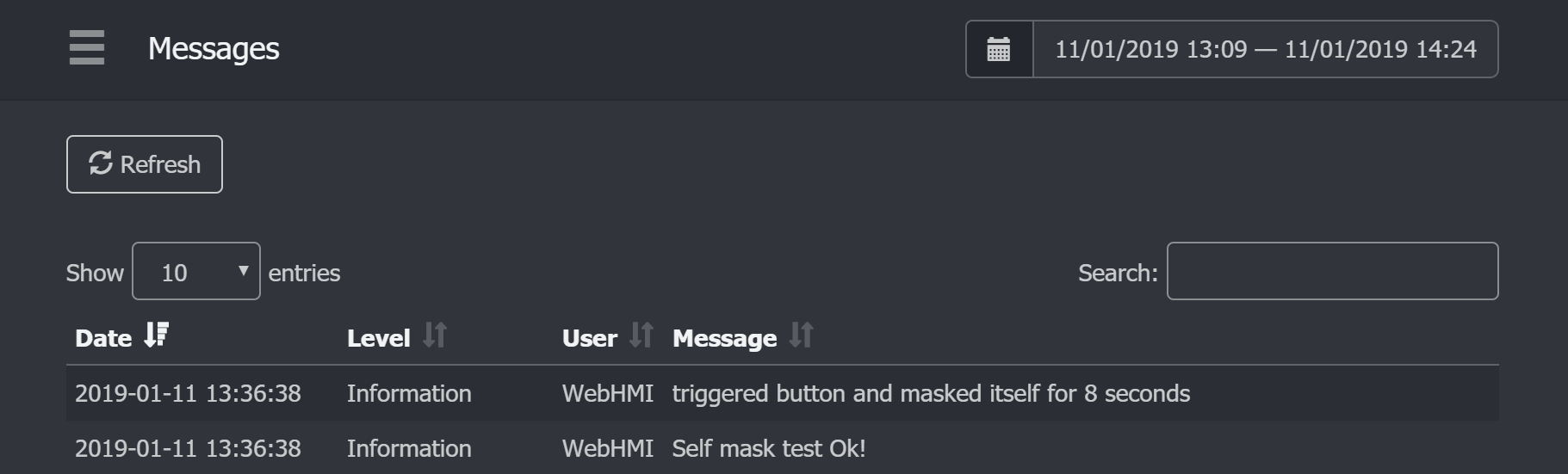
The video how this code works on registers:

You can check how the script worked in the messages log (the second message was generated from the event with enabled 'Add log message' option):
Detecting rise / fall edge of the signals
function P_TRIG(var, previous) -- detect rising or falling state of the register var -- false for nil input -- previous regoster value stored in previous register (id or alias) DEBUG("P_TRIG was called with this " .. var .. " " ..previous) local curVar = R(var) if not curVar then return false end local prevVar = R(previous) ; DEBUG(" p_trig " .. curVar .. " " .. prevVar) W(previous, curVar) if (curVar ~= prevVar) then if (curVar > prevVar) then return "positive" else return "negative" end end return false -- nothing happened end -- P_TRIG -- usage example function main(userId) if P_TRIG("pulseId", "pulsePreviousValue") == "positive" then local counterNewValue = R("counterId") + 1 W("counterId", counterNewValue) end end -- Another version using global callable object P_TRIG = setmetatable({}, -- callable objects like P_TRIG_FOR_COUNTER ... {__call = function(self, regToTrack) -- init section local newValue = R(regToTrack) if (not self.previousValue) then self.previousValue = newValue return false end -- main logic local result if (self.previousValue ~= newValue) then if (newValue > self.previousValue) then result = 'rise' else result = 'fall' end else result = false end self.previousValue = newValue -- store previous value return result end } ) -- usage function main(userId) local ptrig = P_TRIG("testReg2") -- only one call in scan is correct! if (ptrig == "rise") then DEBUG("rise detected!") elseif (ptrig == "fall") then DEBUG("fall detected!") else DEBUG("nothing detected!") end end
Curve handler
This is the library. For more information about the what it is and how to use it click here: Curves
- - curves.lib
function GetCurveValue ( curve_register, x_to_find_y ) --[[ --Curve handler INPUT: Put curve register as first argument and X coordinate as second. OUTPUT: Get as result status if it is inside curve range of outside(false) and the Y value as second output argument EXAMPLE: curve_status, value = GetCurveValue( "curve_for_current_hour", current_hour ) --]] table = cjson.decode( R ( curve_register ) ) -- inRangeCurve( table, x_to_find_y ) for _, value in ipairs( table ) do --piecewise handler inside range of the curve if ( value.range[1] <= x_to_find_y and x_to_find_y < value.range[2] ) then -- in_range_status, index_curve_piece, y = true, index, curveLinearCalc( x_to_find_y, value.k, value.b ) in_range_status, y = true, ( x_to_find_y * value.k + value.b ) return in_range_status, y end end if x_to_find_y < table[1].range[1] then -- behaivior for outside left-sided -- in_range_status, index_curve_piece, y = false, 1, curveLinearCalc( table[1].range[1], table[1].k*0, table[1].b ) --table[1].b in_range_status, index_curve_piece, y = false, 1, ( table[1].range[1] * table[1].k + table[1].b ) --table[1].b return in_range_status, y elseif x_to_find_y > table[#table].range[2] then -- behaivior for outside right-sided -- in_range_status, index_curve_piece, y = false,#table,curveLinearCalc( table[#table].range[2], table[#table].k, table[#table].b ) --table[#table].b in_range_status, y = false,#table,( table[#table].range[2] * table[#table].k + table[#table].b) return in_range_status, y end return in_range_status, y end
Example of usage:
- - curves getter
include "curves.lib" function main (userId) local t = os.date("*t", os.time()) current_hour = tonumber(t.hour) curve_status, y = GetCurveValue( "curve_for_current_hour", current_hour ) WriteReg("value_for_current_hour", y) end
Detection of change of state
Sometimes you may need take actions upon changing any of the registers in a set. The following function returns true at the moment (scan) the value differs from previous value or false if no changes. Also, it can call callback function to make your code more readable.
OnChange = {} ; setmetatable(OnChange, {__call = function(self) return function(v, cb) local out = false if (not self.prev) then self.prev = v end if (self.prev and v ~= self.prev ) then out = true if cb then cb() end end self.prev = v return out end end }) function main (userId) if (not onchange1) then onchange1 = OnChange() end onchange1(R(110), function() INFO("true!") end ) ------- Detecting changes of a set of registers ---------------- local regSet = {{110, function() INFO("I'm a callback for reg 110") end }, {1, function() INFO("I'm a callback for reg 1") end }, {200, function() INFO("I'm a callback for reg 200") end }, } local handlers = {} -- registereing handlers if (not handlers[regSet[1][1]]) then for _, s in ipairs(regSet) do handlers[s[1]] = OnChange() end end -- using handlers for _, s in ipairs(regSet) do local reg, func = s[1], s[2] handlers[reg](R(reg), func()) end end
Filters
In some projects, due to bad quality of the comm. lines your values can flicker like “3.14” (good one) and “-” (no data). That may confuse the users of the system and spoil graph curves. To filter these values for the safe timeout, you can use the script below. The script shold be set as running on each scan and will do the following:
- use the table with pairs of `register to be filetered - its safe copy` and respective counter
- if the value is read just copy it to the safe copy,
- otherwise, start counting errors for this particular register
- write invalid value after a nubmer of failed attempts
READ_ATTEMPTS_BEFORE_ERR = 10 -- scan count before setting invalid value INVALID_VALUE = -100000 -- invalid value sign filter = { {reg = 1, safeCopy = 2, errCount = 0}, -- reg - source register {reg = 3, safeCopy = 4, errCount = 0} } -- safeCopy - last read ok value function main (userId) runFilter(filter) end function runFilter(f) for _, fstruc in ipairs(f) do local curVal = R(fstruc.reg) if (curVal) then W(fstruc.safeCopy, curVal) fstruc.errCount = 0 else if (fstruc.errCount >= READ_ATTEMPTS_BEFORE_ERR) then W(fstruc.safeCopy, INVALID_VALUE) else fstruc.errCount = fstruc.errCount + 1 end end end end
Processing double float numbers
function main (userId) local test_hi = 0x3FBF98AD local test_lo = 0x0A8FA5FB INFO("d2float = " .. d2float(test_hi, test_lo)) end function d2float(hi, lo) ----------------------- CONVERT DOUBLE FLOAT TO FLOAT --------------------------- local function getNumberFromTab(tab, start, length) -- get a number from table local result_str = "" for i = start, (start + length - 1) do result_str = result_str .. tostring(tab[i]) end return tonumber(result_str,2) end local function dw_to_bits(hex_dw) local binMapper = {[0] = '0000', [1] = '0001', [2] = '0010', [3] = '0011', [4] = '0100', [5] = '0101', [6] = '0110', [7] = '0111', [8] = '1000', [9] = '1001', [0xA] = '1010', [0xB] = '1011', [0xC] = '1100', [0xD] = '1101', [0xE] = '1110', [0xF] = '1111' } local hex_str = string.format("%X", hex_dw) local len_remainder = 8 - #hex_str hex_str = (len_remainder > 0 and string.rep('0', len_remainder) .. hex_str) or hex_str local out = '' for i = 1, #hex_str do local d = tonumber(hex_str:sub(i, i), 16) local tetra = binMapper[d] out = out .. tetra end INFO(out) return out end local NaN = tonumber("11111111111111111111111111111111", 2) local result_str = dw_to_bits(hi), dw_to_bits(lo) local result_tab = {} for i = 1, #result_str do local b = result_str:sub(i, i) table.insert(result_tab, b) end local sign, exp, mantissa = 0, 0, 0 local fraction_table = {} -- fraction part table sign = ((result_tab[1] == "1") and -1) or 1 -- get sign exp = getNumberFromTab(result_tab, 2, 11) -- get exp for i = 13, 64 do table.insert(fraction_table, result_tab[i]) -- mantissa end for j = 1, 52 do if (fraction_table[j]== "1") then mantissa = mantissa +(2 ^(-1 * j)) -- calc. mantissa by summing individual bits end end mantissa = mantissa + 1 local result_num = sign * (2 ^ (exp - 1023)) * mantissa ----------------------------------------- exceptions ---------------------------------- if exp == 0 then -- subnormals result_num = sign*(2^(-1022))*(mantissa-1) end if exp == 0x7ff then -- nan result_num = NaN; end return result_num end
You can test the example above here

